米国のサイトにアクセス
米国のサイトにアクセス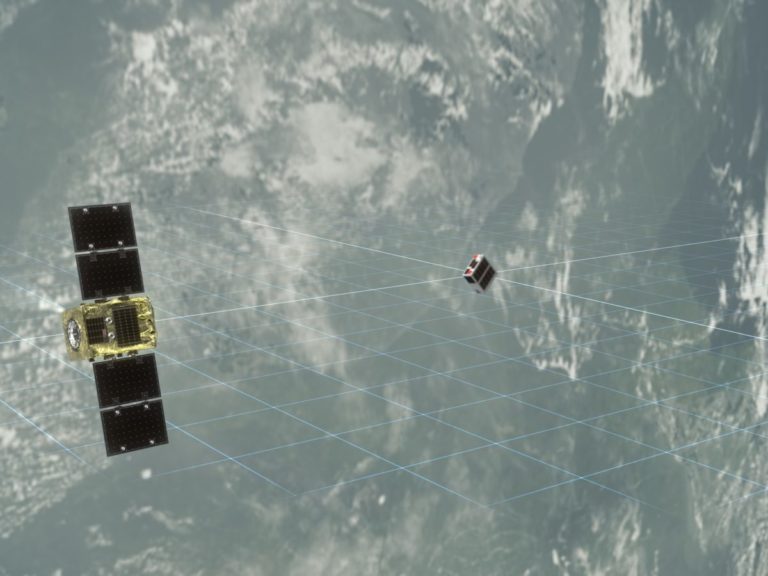
アストロスケール、デブリ除去技術実証衛星「ELSA-d」で 高難度の誘導接近の実証に成功
軌道上サービスに不可欠なRPO技術において大きな前進
持続可能な宇宙環境を目指し、スペースデブリ(宇宙ごみ、以下、デブリ)除去サービスを含む軌道上サービスに取り組む株式会社アストロスケールホールディングス(本社:東京都墨田区、創業者兼 CEO 岡田 光信)は、この度当社のデブリ除去技術実証衛星「ELSA-d (エルサディー、End-of-Life Services by Astroscale – demonstrationの略)」による、模擬デブリ(クライアント)への誘導接近の実証に成功したことをお知らせいたします。具体的には、捕獲機(サービサー)による遠距離からの物体の観測および追跡、非制御物体へ誘導接近、絶対航法から相対航法への切替えなどの複雑で高難度な技術実証を含みます。これらは、RPO*1(ランデブ・近傍運用)そして軌道上サービスの実現に必要不可欠なものです。この実証は、民間で前例のない低軌道上ミッションとなりました。
アストロスケールELSA-dプロジェクトマネージャーの飯塚清太は、以下のように述べています。 「サービサーをクライアントに接近させ、絶対航法から相対航法への切替えに成功したことで、衛星運用終了時のデブリ化防止策としてのEOL *2サービスの実現に必要な、多くのコア技術や運用機能の実現性を証明することができました。これらの実証結果は、私たちやパートナーにとってデブリ除去サービスの開発における非常に大きな自信となりました。この素晴らしい成果を成し遂げたチームを大変誇りに思います。」
ELSA-dは、デブリ除去に係る一連のコア技術を実証する世界初の商業ミッションです。軌道から安全にデブリを除去するための捕獲機構を備えたサービサーと、デブリ化した衛星を模したクライアントで構成されており、2021年3月にカザフスタンのバイコヌール基地より高度550kmの軌道へ両衛星を固定した状態で打ち上げ、軌道投入されました。同年8月25日「試験捕獲」の実証に成功し、磁石を活用した捕獲機構、搭載センサ、カメラ等が正常に機能することを確認しました。
その後「自律捕獲」の実証運用を2022年1月25日に開始。サービサーからクライアントを分離後、サービサーへ搭載のLow power radio(LPR)センサを駆使し、自律的な軌道維持アルゴリズムによってクライアントから30mの距離を維持することに成功しました。この重要な機能の実証を7時間以上にわたり成功させましたが、その後人工衛星に異常を検出。ミッションの安全のため、異常を解決するまで捕獲の延期を決定しました。その後、いくつかの問題を調査できるよう、サービサーとクライアントの間に安全な距離を確保。ゆっくりと離れ続けることにより最大約1,700 kmの距離がありました。
直面した最も大きな課題は、サービサーに搭載の8つのスラスタのうち4つのみを使用してクライアントへ接近(ランデブ)することでした。これは、接近するための精密な軌道制御(マヌーバ)能力が制限されたことを意味します。4つのスラスタの機能喪失について、3つはシステム由来によるものですが、他1つの根本原因の究明には至っておらず、当該部品のサプライヤーであるBradford/ECAPS社と連携して現在調査を続けています。
サービサーによるクライアントへの誘導接近に備えるため、当社は過去2か月間、複数回にわたってマヌーバを実施。そして4月7日、ELSA-dチームは残存するスラスタを駆使し、サービサーを誘導接近させ、クライアントから159 mの距離にてクライアントを探索し検出したことで、GPSと地上からの観測値を用いる絶対航法から、衛星搭載センサを駆使する相対航法へ切り替えました。この測位手法の切替えは、これまでのELSA-dミッションにおいて最も困難な運用であり、また軌道上サービスの運用において実現することが最も難しい機能の1つとして広く認識されています。
この重要な運用の完了後にサービサーを再度クライアントから遠ざけており、数か月間はこのまま安定した距離を保ちます。この間ELSA-dチームは、クライアントの安全な再捕獲の可能性を含め、ミッションの次の段階について分析する予定です。
自律捕獲の実証の完了には至っていませんが、これまでのELSA-dミッションにおいて、以下を含むデブリ除去のためのコア技術を実証することができました。
- 自律制御機能と航法誘導制御アルゴリズム
- 航法センサー群を駆使した閉ループ制御
- スラスタによる自律的な接近マヌーバおよび姿勢制御
- 絶対航法の技術(GPSと地上観測)を活用したサービサーの誘導航法(クライアントから約1700kmの距離から約160mへの接近)
- 絶対航法から相対航法への移行(サービサー搭載のLPRセンサを活用)
- 1年以上にわたる軌道上でのミッション運用経験
- ドッキングプレートと磁石を用いた捕獲機構
また、この先駆的な技術実証を進めるELSA-dは、宇宙の持続可能性(スペースサステナビリティ)や軌道上サービスの実現への道を切り拓くことで、米宇宙業界誌Via Satelliteの「Satellite Technology of the Year」」や内閣府主催第5回宇宙開発利用大賞の「内閣府特命担当大臣(宇宙政策)賞」を含む数々の賞を受賞しています。さらには、同ミッションはアストロスケールがTIME誌の「世界で最も影響力のある100社(TIME 100 Most Influential Companies)」やFast Companyの「2022年版 最も革新的な宇宙企業10社(The 10 most innovative space companies of 2022)」に選出される上でも重要な役割を果たしました。
アストロスケール創業者兼CEOの岡田光信は、以下のように述べています。 「ELSA-dの実証は、たとえ理想的な状況下であっても、決して簡単に成し遂げられるものではありませんでした。しかし当社のグローバルチームは多くの課題を乗り越え、拡大の一途を辿る軌道上サービス市場の成長をさらに加速し得る大きな成功を収めることができました。チームの功績を世界中から認めていただいていることを大変嬉しく思うとともに、世界中の宇宙コミュニティの皆様のご支援に感謝の意を表します。」
アストロスケールのEOLサービスによって、衛星運用者は、保有衛星の保護、他の衛星との衝突回避、そして軌道環境の保全など、積極的な取り組みへの示唆が可能となります。ELSA-dミッションからの知見は、軌道上ミッションで役目を終えた複数の人工衛星を除去する衛星「ELSA-M(エルサ・エム、End-of-Life Services by Astroscale – Multi clientの略)」での設計・開発に活かしてまいります。英国宇宙庁(UKSA)や欧州宇宙機関(ESA)を主要パートナーとして軌道上実証を予定しており、そのための技術開発と計画を進めています。続くELSA-Mのミッションでは、OneWeb社などの衛星コンステレーション運用者保有の複数機の衛星を捕獲する機能検証を実施予定です。
今回の実証に係る画像・動画:https://www.dropbox.com/sh/wemrpzll6u106pw/AAD_Rk0zPeSQ4Ztx9IsiSq2a?
dl=0
ELSA-dのミッションページ:https://astroscale.com/ja/missions/elsa-d/
ELSA-d関連画像:https://astroscale.com/resources/?_sft_resource_category=elsa-d-images
ELSA-dプレスキット:https://astroscale.com/wp-content/uploads/2022/02/ELSA-d-Press-Kit-2022-Lo-Res-JPN.pdf