米国のサイトにアクセス
米国のサイトにアクセス
宇宙ごみ除去のアストロスケールが民間世界初、除去実証実験機「ELSA-d」のシステム組立・試験を始動 〜宇宙環境の改善、低軌道の持続性確保に向けて〜
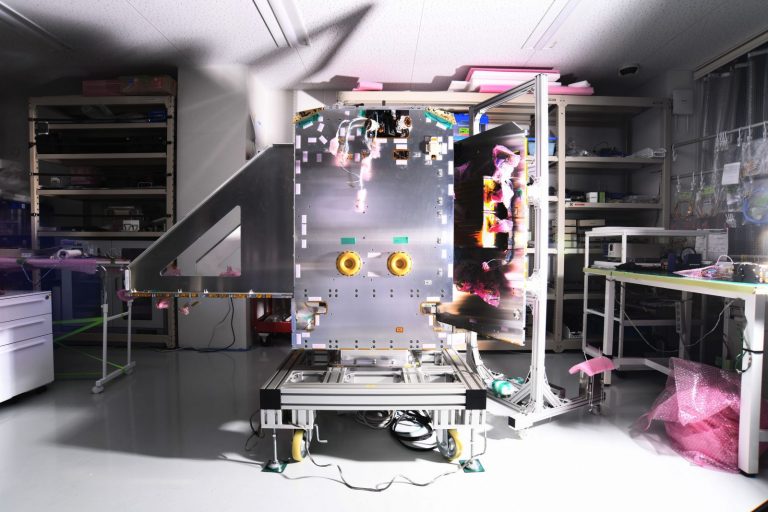
宇宙機の安全航行を目指し、スペースデブリ(宇宙ごみ、デブリ)除去サービスに取り組む、株式会社アストロスケールホールディングス(本社:日本、創業者兼CEO:岡田 光信、以下「アストロスケール」)は、2020年半ばの打上げを予定する、デブリ除去実証実験機「ELSA-d(エルサディー)」の詳細設計審査やサブシステム単位での各種試験を経て、衛星システム組立・試験(AIT:Assembly, Integration & Test)に移行しています。
ELSA-dプロジェクトマネージャー飯塚 清太は、以下のように述べています。「ELSA-dプロジェクトが、衛星システムの組立・試験へと重要な局面を迎え、着実に進行していることを喜ばしく思います。同プロジェクトは、前例のない非常に複雑なランデブ・ドッキング及び近接運用の実証実験を宇宙空間で行うものです。この革新的なミッションが、軌道上の持続性確保へ寄与する第一歩となることはもちろん、従事するエンジニアにとって、大変刺激的な挑戦であると捉えています。」
民間で世界初となるデブリ除去実証実験機「ELSA-d(エルサディー)」は、捕獲機(約180kg)と宇宙ごみを模擬した人工衛星(約20kg)を結合した状態で低軌道へ打ち上げ、軌道上において、難易度の高い捕獲実証実験を行います。磁石を用いた複数回に及ぶ捕獲とリリースによって、接近(相対航法)、診断(近傍制御・作業)、捕獲(ランデブ・ドッキング)、捕獲後の軌道変更まで、デブリ除去に必要なコア技術を一連のシステムとして実施します。
ランデブ・ドッキングの内、国際宇宙ステーションと補給船「こうのとり(HTV)」などで見られるような「協力接近・捕獲」の技術実証例はこれまで存在しますが、本プロジェクトが実施する「準協力接近・捕獲」は、捕獲対象の姿勢制御や捕獲対象が通信機能を持たない条件下となり、世界でも初の試みとなります。加えて、当実証では将来の商業サービス提供の際の顧客要求や想定条件を見据えています。例えば、捕獲対象を意図的に回転させることで、姿勢制御機能を失いデブリ化した人工衛星の状態を意図的に生み出したり、捕獲対象を相対航法センサーの視野から敢えて見失わせ、ドッキングプレートや捕獲機搭載のカメラや光学センサー等により、軌道位置の特定や接近が可能なことを実証します。
低軌道での大規模コンステレーション計画の勃興により、機能停止中の人工衛星と稼働中の衛星の衝突可能性はこれまで以上に高まり、更なる衝突予測がなされています。衝突確率の増加は、現存の衛星だけでなく、今後打上がる衛星も含めた社会活動を支える衛星データ利用すらも危険に晒すことになるでしょう。同プロジェクトは、軌道上の故障機を除去することで、延いては低軌道の安全性確保へ資する重要な役割を担うでしょう。
創業者兼CEOの岡田 光信は、以下のように述べています。「スペースデブリ問題の解決策は、長きに亘り議論がなされてきましたが、以前に増して、世界中で解決を求める声が高まっています。ELSA-dは、デブリ低減における革新的な技術実証の一端として重要な意味を持ちながら、解決における一要素でしかないと捉えています。当社アストロスケールでは、宇宙が持続可能で安全に確保されるよう、そして人類が宇宙での経済活動を継承する為に、法規制やビジネスモデルの確立に同時に取り組む所存です。」
本プロジェクトの組立作業では、バス機器(電源系、姿勢制御系、推進系、熱・制御系、計装系、通信系、データ処理系)、ミッション機器(磁石を含む捕獲機構系、航法センサー等GNC類)を搭載後、各種環境試験を終え、出荷・打上げを迎えることになります。捕獲機と模擬デブリは、2020年半ばにカザフスタン共和国のバイコヌール宇宙基地より打ち上げられる予定です。
英語のプレスリリースはこちらからご覧ください 。